인공지능과 함께하는 우주를 향한 인류의 도전, NASA FDL - 2018
최근 비약적으로 발전하고 있는 인공지능 기술은 핵심 알고리즘부터 어플리케이션까지 접목이 가능하며, 어떤 분야에서 좋은 성과를 내는 모델은 다른 분야에서도 활용할 수 있어 학제간(interdisciplinary) 접근에 용이합니다. 여러 분야에서 인공지능 기술 기반의 프로젝트가 생겨나고 있으며, 그 중 우주분야에서 국가기관과 학계 그리고 민간 기업에서 서로 협력하여 인공지능 기술을 접목한 프로젝트를 수행하는 프로그램인 NASA(National Aeronautics and Space Administration)의 Frontier Development Lab(이하 FDL)을 소개하고자 합니다.

FDL은 전 세계의 선도적인 기관으로부터 지원한 다양한 연구 분야 및 배경을 가지고 있는 박사과정, 혹은 박사 후 과정 수준의 연구원, 멘토 및 민간 고문 등이 모여 팀을 구성하고, 문제 이해 및 다양한 방법을 통한 해결책을 구상합니다. 각 팀들은 할당된 프로젝트를 서로 경쟁하면서 수행하지만 동시에 기술 공유도 활발하게 이뤄질 수 있도록 연구 문화가 형성되어 있습니다. 또한 NASA가 구축한 데이터를 자유롭게 접근을 할 수 있고, 다양한 분야의 수석 연구원과 자유롭게 교류할 수 있으며, 최첨단 GPU 컴퓨팅 자원, 교육 및 멘토링 등 인공지능 기술 연구를 위한 최적의 환경을 제공합니다. 적대적 신경망(Generative Adversarial Network, GAN), 가변 오토인코더(Variation Auto-Encoders, VAE)와 같은 비지도 학습 알고리즘 등 최신 기술 접목을 위한 연구도 수행되지만 특성이 다양한 데이터를 다루기 때문에 베이지안 최적화와 같은 전통적인 기계학습 알고리즘을 혼합한 모델 연구도 수행됩니다. 이 FDL 프로그램의 위원회 구성은 다음과 같습니다. Ian Goodfellow님, Francois Chollet님, Yarin Gal님이 보이시네요.
FDL 연구방법 및 연구활동
방법론
FDL에서는 여섯 가지 방법론에 기초하여 연구가 수행됩니다. 첫째, 주어진 문제가 무엇인지 그리고 연구 목표가 무엇인지 정확하게 인식하는 것부터 시작합니다. 팀으로 연구하기 때문에 효과적인 연구를 위해서는 반드시 선행되어야 하는 부분입니다. 둘째, 단일 분야가 아닌 다양한 분야의 전문가들로 팀을 구성합니다. 단일 분야 전문가로 구성된 팀은 수월한 진행이 될 수는 있지만 문제를 다른 각도에서 볼 수 있는 시각과 새로운 발견이 필요한 연구에는 적합하지 않습니다. 오히려 대부분의 혁신적인 발견은 서로 다른 분야의 전문가들의 협업, 그리고 그들이 의견이 충돌하는 과정에서 일어난다고 합니다. 셋째, 지속적인 협력과 열린 토론이 일어날 수 있도록 공동 연구를 수행합니다. 어떤 문제가 있을 때, 그 문제를 해결하는 가장 좋은 방법은 팀들에게 동일한 문제를 주고 이 팀들을 경쟁시키는 것이라고 생각할 수 있습니다. 그러나 FDL은 이러한, 동일한 문제를 주고 서로의 자원을 공유하지 않은 채 경쟁시키기 보다는 서로의 작업을 지속적으로 발전시키는 협력 문화와 열린 토론 속에서 문제를 풀어나가기를 원합니다. 문제 해결을 위하여 서로 고민했던 시간들과 다양한 방법으로 시도했던 광범위한 기술의 집합이 본 연구의 최종 결과물입니다. 넷째, 빠른 반복을 통해 새로운 발견을 할 수 있도록 합니다. 어떠한 과제를 수행함에 있어서 반복하고, 실수하며 배우는 것은 새로운 발명을 이끌어냅니다. FDL은 숙련된 멘토와 코치들을 통하여 팀들이 많은 발견을 하고, 그것을 이루어낼 수 있도록 지원하고 있습니다. 다섯째, 간접적 영감이 일어날 수 있도록 소통 방법을 수행합니다. 간접적 영감이라 함은, 우리의 두뇌가 어떠한 대상으로부터 패턴을 보고 기억한 후에, 완전히 새로운 것을 발견하기 위하여 그것을 다른 상황에 적용하는 능력을 말합니다. 이것을 유사 영감이다고도 말하며, 생체 모방과 같은 방법론의 배경이 되기도 합니다. FDL에서는 여러 산업계의 인물들과 강연자를 초청하여 경험을 나누거나, 견학 등 다양한 방법을 마련하였고, 이를 통하여 참가자들이 영감을 얻을 수 있도록 8주 계획에 반영 및 계획합니다. 여섯째, 팀이라는 집단을 의식하며 이를 위한 연구 계획을 수립합니다. 한 팀으로서 새로운 발견을 향한 여정을 이어갈 때, 그 팀은 스스로 학습하고, 문제에 대하여 더 깊게 이해하게 됩니다. 이러한 더 깊은, 성숙한 이해는 어떤 문제의 해결책이 스스로 나타날 때 집단 인식이 가능하도록 합니다. 혁신은 한 천재의 고독한 행동이 아닌 팀이 함께 하는 강력한 생각의 한 조각, 즉 느린 직감의 형태로 도달하기 때문입니다.
협력
FDL에서는 행성 방어, 우주 기상, 달 탐사 등의 분야에 인공지능을 도입하는 과정에서, 공공 분야와 민간 분야의 파트너십이 훌륭한 결과를 이끌어낼 수 있는 잠재력을 가지고 있음을 입증하였습니다. 지난 2년간, FDL은 연산 및 데이터 처리 뿐만 아니라 전문 지식, 멘토링, 홍보, 연속성, 교육 등을 제공해준 민간 부분 및 학술 파트너로부터 많은 지원과 혜택을 얻었습니다. 이러한 파트너들은 올 해에도 다시 FDL에 가입하여 지원을 줄 것을 확정하였으며, 팀에 합류할 더 많은 파트너들을 찾고 있습니다.
 [그림 1] 2017 FDL에서 강연을 하는 Francois Chollet 구글 소속의 개발자이며, 딥러닝 프레임워크 케라스(Keras)[1]의 개발자입니다.
[그림 1] 2017 FDL에서 강연을 하는 Francois Chollet 구글 소속의 개발자이며, 딥러닝 프레임워크 케라스(Keras)[1]의 개발자입니다.
데이터셋
FDL에서는 연구 개발 활동을 위하여 NASA가 보유하고 있는 방대한 양의 데이터를 제공합니다. 각 도전과제별로 다양한 종류의 데이터를 제공하며, 그 내용은 다음과 같습니다.
- Lunar Resources
- Lunar Reconnaissance Orbiter (LRO)의 Lunar Orbiter Laser Altimeter (LOLA) 관측기기 자료를 이용한 Digital Elevation Models (DEM)
- Lunar Reconnaissance Orbiter Camera (LROC)의 Narrow Angle Camera (NAC) 관측 영상
- Long Period Comets
- Cameras for Allsky Meteor Surveillance (CAMS) 전천 카메라를 이용한 혜성 관측 영상
- Asteroid Radar 3D Shape Modeling
- Arecibo 300m 전파망원경으로 관측한 레이더 영상
- Goldstone 전파망원경으로 관측한 레이더 영상
- 도플러 관측 영상과 관련 메타 데이터를 포함하는 합성 데이터
- Solar Storm Prediction
- Solar Dynamics Observatory (SDO)/HMI 자기장 영상
- SDO/AIA 극자외선 영상
- GOES 위성으로부터 관측한 x-ray 플럭스
- Solar Terrestrial Interaction
- ONMI 시계열 자료
- United Sates Geological Survey (USGS) 지상 관측 지자기 데이터
- National Oceanic and Atmospheric Administration (NOAA, 미 대기해양청) Kp 지수 자료
- SDO/AIA 극자외선 영상
학술활동
FDL에서는 연구 활동과 결과를 토대로 적어도 하나 이상의 학술 발표를 하도록 장려하고 있습니다. 지금까지 FDL의 팀들은 다음과 같은 학술대회에서 발표하였습니다.
- GPU Technology Conference, Washington DC, USA: Defending our Planet with AI by James Parr
- 5th IAA Planetary Defense Conference, Tokyo, Japan: Application of Machine Learning for Planetary Defense by Frank Marchis
- AAAI Futures Conference, San Francisco, California, USA: Defending our Planet with AI by James Parr
- Digital DNA, Belfast, Northern Ireland: Defending our Planet with AI by James Parr
- GPU Technology Conference, Munich, Germany: AI & Deep Learning by Susana Zoghbi
- Lunar Exploration Analysis Group, Columbia, USA: AI & Space Sciences by Sara Jennings
- NewSpace Europe, Luxembourg: Artificial Intelligence and Space by Sara Jennings & Jacek Czaja
- Neural Information Processing Systems, Long Beach, USA: Deep Learning in the Physical Sciences by Susana Zoghbi, Sean McGregor
- Women in Machine Learning workshop, Long Beach, USA: Planetary Defense: In Search of Long Period Comets with Deep Learning by Susana Zoghbi
- AGU Fall Meeting, New Orleans, Louisiana, USA: Modeling Geomagnetic Variations using a Machine Learning Framework by Bala Poduval
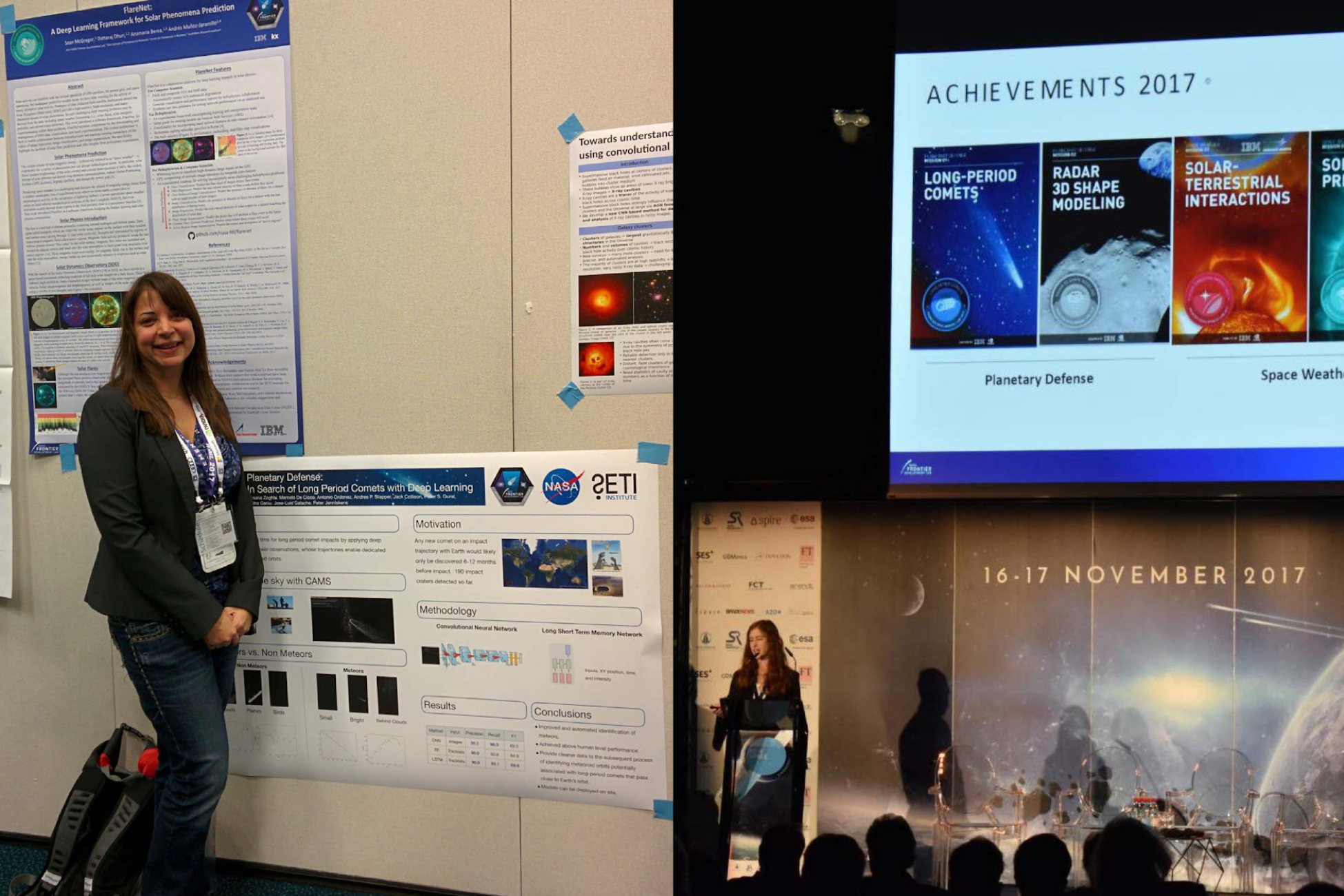

[그림 2] 각종 학회에서 결과를 발표하는 FDL팀[2]
FDL 2017 연구내용
LONG PERIOD COMETS
LPC(Long Period Comets)는 최소 200년 이상의 주기를 갖는 혜성을 뜻하며, 만약 지구와 충돌할 경우 큰 피해가 발생합니다. 따라서 LPC의 관측 및 궤도를 추적하기 위하여 CAMS(Camera for Allsky Meteor)라 불리는 카메라 네트워크를 통하여 혜성을 관측하고 있으며 사람이 최종적으로 혜성의 유무를 분류합니다. 그림 3은 CAMS 카메라 네트워크가 촬영한 영상으로 왼쪽은 구름, 비행체, 새를 혜성이라고 잘 못 인식한 것을 나타낸 것이고 오른쪽은 혜성이 작게 혹은 밝게 관측되거나 구름에 가려 혜성 감지에 실패한 경우를 나타내었습니다[3]. 이는 현재 CAMS 네트워크가 혜성의 유무를 자동으로 분류하지 못하는 것을 뜻하며 따라서 현재의 워크플로우에서 사람의 개입이 필요한 상황입니다. 하지만 현재 CAMS 네트워크는 하루 밤사이에 약 8,000장의 사진을 촬영하며, 이에 대한 검토 및 분류하는 작업은 많은 인력과 시간이 필요로 하기 때문에 FDL은 딥러닝 기반 혜성 분류 모델 연구를 수행하였습니다.
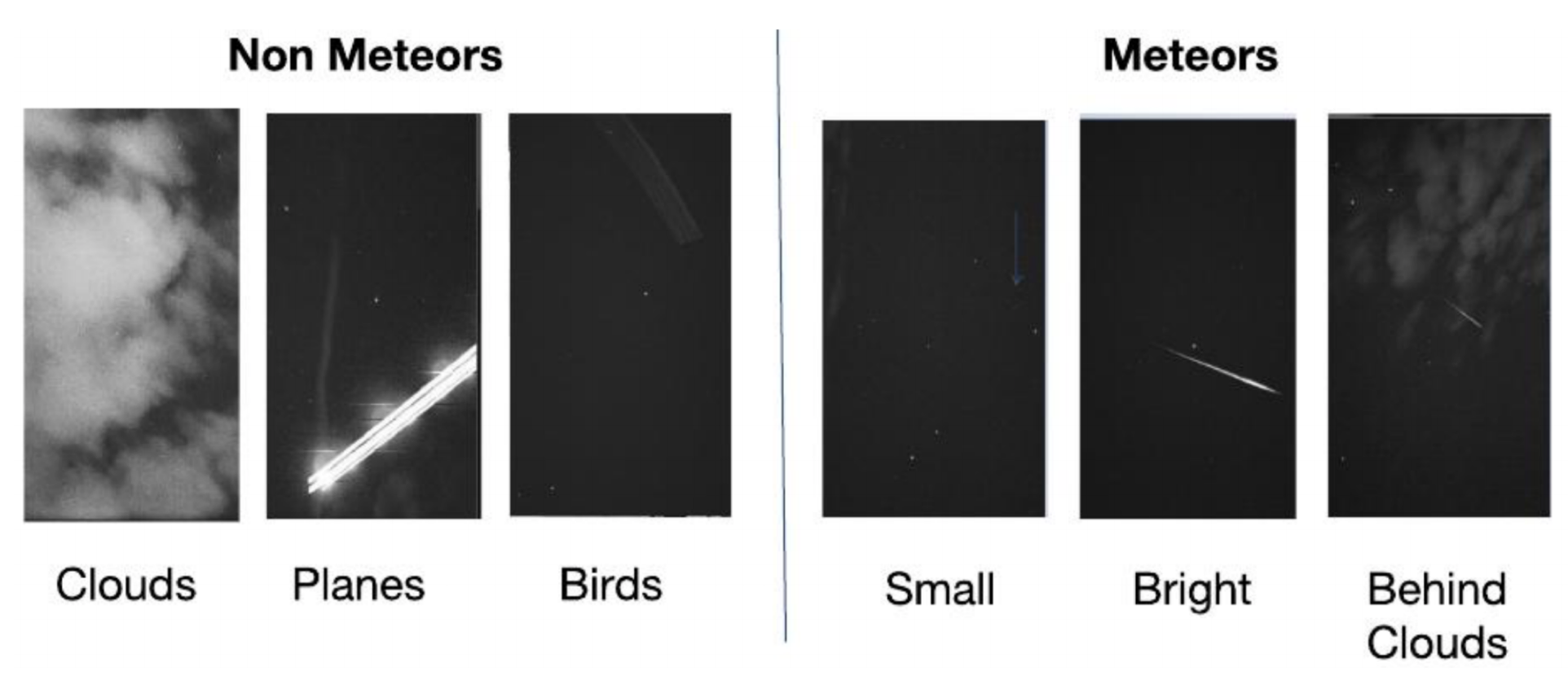
[그림 3] CAMS에 의하여 촬영된 영상
혜성 감지를 위하여 사용한 딥러닝 모델은 영상처리 분야에서 주로 사용되는 CNN(Convolutional Neural Network) 모델과 순차데이터 혹은 시계열데이터를 처리할 때 주로 사용하는 모델인 LSTM(Long Short Term Memory)을 사용하였습니다. 또한 랜덤포레스트 기법을 통한 분류 성능을 베이스라인으로 하여 딥러닝 모델의 성능을 비교하고 분석하였습니다. 혜성 감지를 위한 CNN 네트워크는 AlexNet 아키텍처를 사용하였으며 카메라 촬영 영상을 입력하였다(그림 4). LSTM 모델은 혜성의 X, Y 좌표와 시간 그리고 빛의 강도를 입력받아 혜성의 유무를 판별하였다.
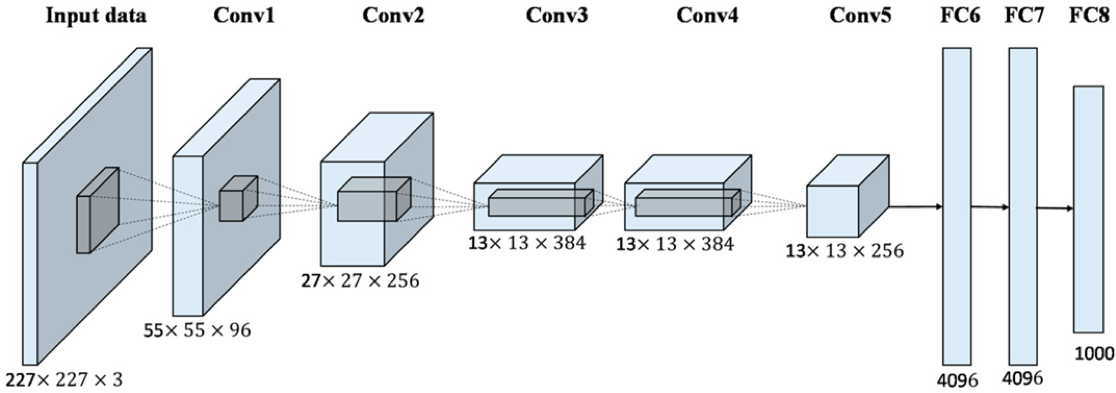
[그림 4] 혜성 분류를 위한 CNN 네트워크(AlexNet 아키텍처)
표 1은 본 연구에 사용된 3가지 모델의 정밀도(Precision), 재현율(Recall), F1 스코어를 나타내었습니다. F1 스코어는 정밀도와 재현율을 조합하여 모델의 성능을 나타내는 지표로, F1 스코어를 살펴보았을 때 LSTM와 CNN의 성능은 모두 랜덤포레스트에 비하여 좋은 성능을 보였고 두 모델의 성능 간에는 큰 차이를 보이지 않았습니다. FDL은 두가지 딥러닝 모델을 이용하여 혜성 분류 작업을 자동화할 수 있었다고 NIPS 학회에서 발표하였습니다[3].
[표 1] 3가지 모델의 성능[3]
| Method | Input | Precision | Recall | F1 |
|---|---|---|---|---|
| CNN | Images | 88.3 | 90.3 | 89.5 |
| Random Forest | Tracklets | 90.0 | 80.6 | 84.9 |
| LSTM | Tracklets | 90.0 | 89.1 | 89.6 |
RADAR 3D SHAPE MODELING
2016년 1월, NASA에서 개설한 PDCO(Planetary Defense Coordination Office)는 지구와 소행성의 충돌을 대비하여 충돌 가능성 조기 탐지를 목표로 광범위의 소행성 관측 네트워크를 구축하기 위해 노력하고 있다[4]. 그림 5은 NASA가 2015년까지 레이더를 이용하여 탐지했던 지구와 충돌 위험성을 보이는 소행성의 개수를 나타낸 것이다[5]. 지구와 소행성의 충돌을 예측하기 위해서는 소행성의 정밀한 궤도 결정이 필수 요소이며 궤도 위의 물체는 움직이고 있기 때문에, 적외선이나 광학 장비를 이용하는 것보다 지상 기반 레이더를 이용한 궤도 결정이 더 적절합니다. 정밀한 궤도 결정을 위해서는 레이더로 관측한 물체의 크기, 형상, 천체 동역학 등을 모두 고려해야 하며 우주 물체 크기 및 형상을 추정하기 위해서 레이더를 이용한 3차원 복원 방법이 일반적입니다. 그림 6는 실제 소행성으로부터 반사된 레이더 주파수 정보를 기반으로 생성한 도플러 영상입니다.
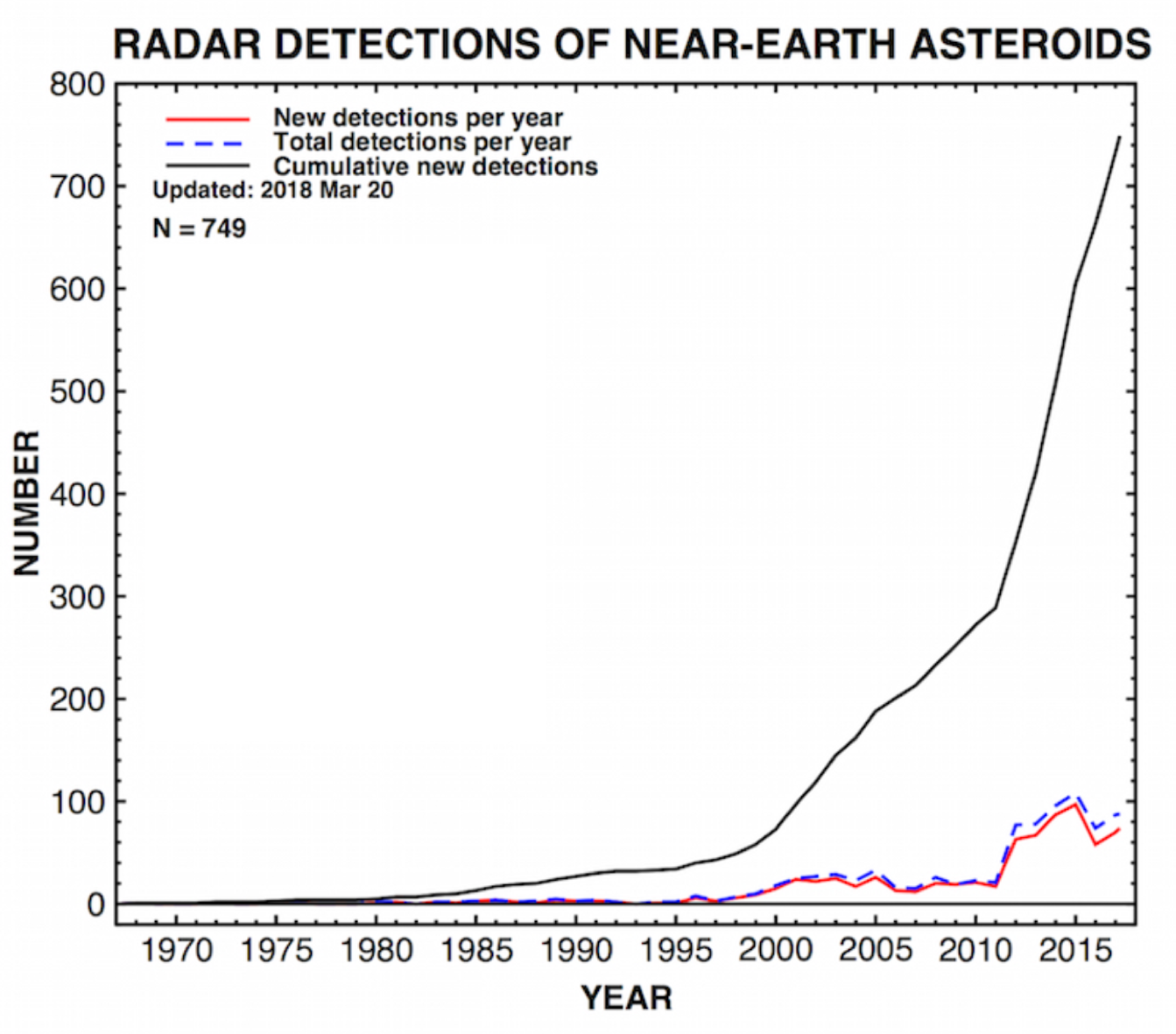
[그림 5] 1970년부터 NASA가 탐지한 지구 근처 소행성의 개수 현황
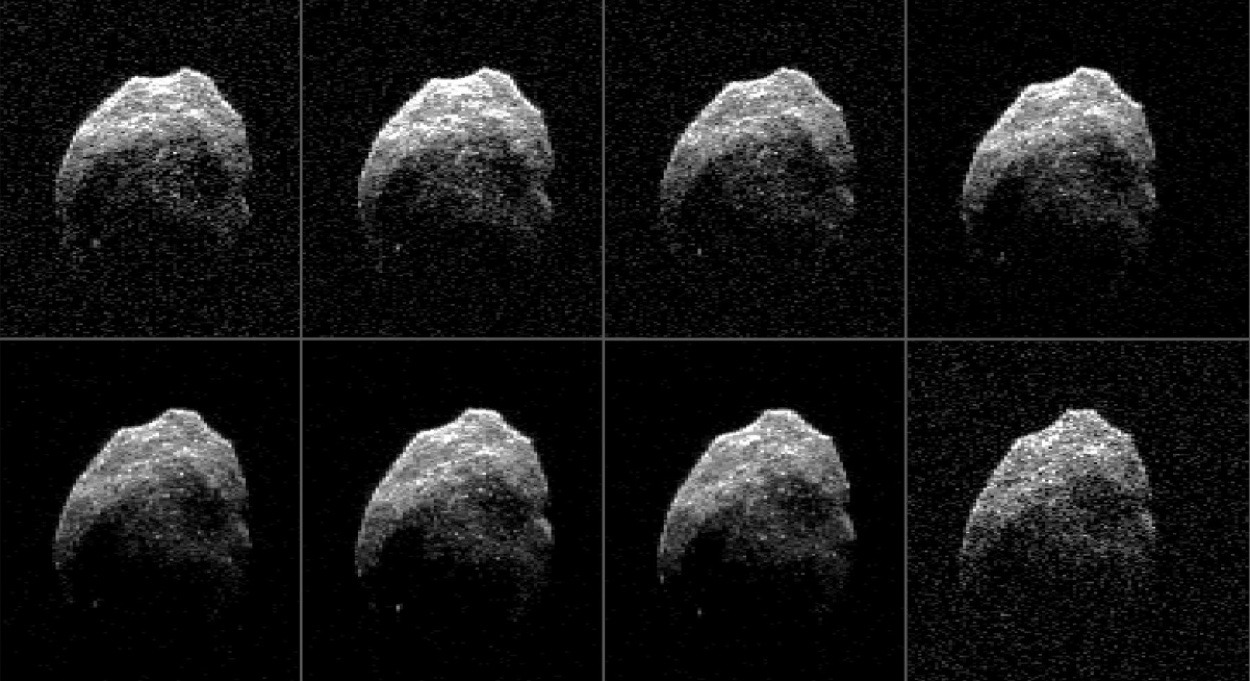
[그림 6] 레이더 실측 도플러 데이터로 생성한 소행성 2015 TB145의 2차원 레이더 영상[6]
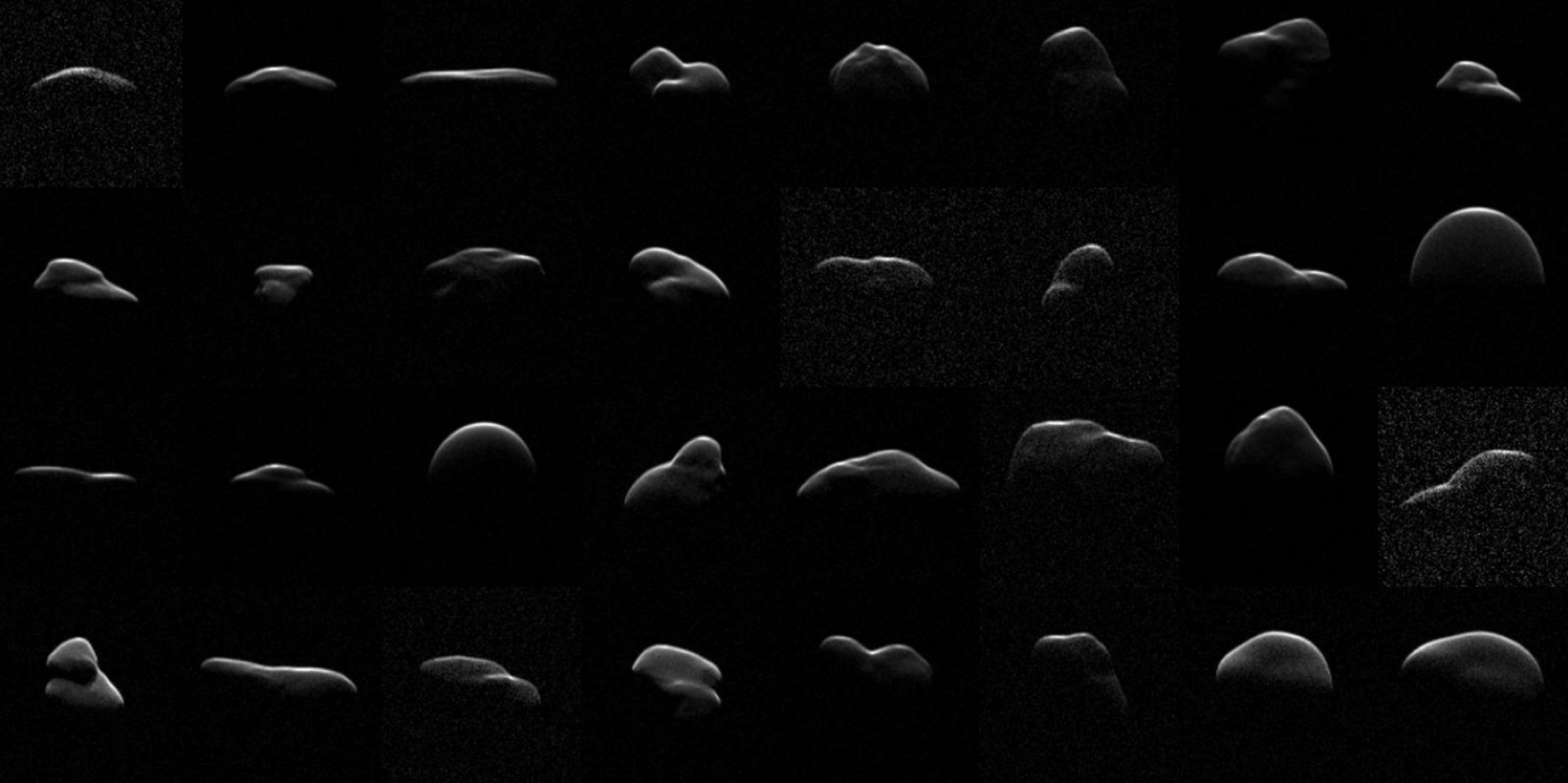
[그림 7] SHAPE로 생성한 소행성의 2차원 영상[2]
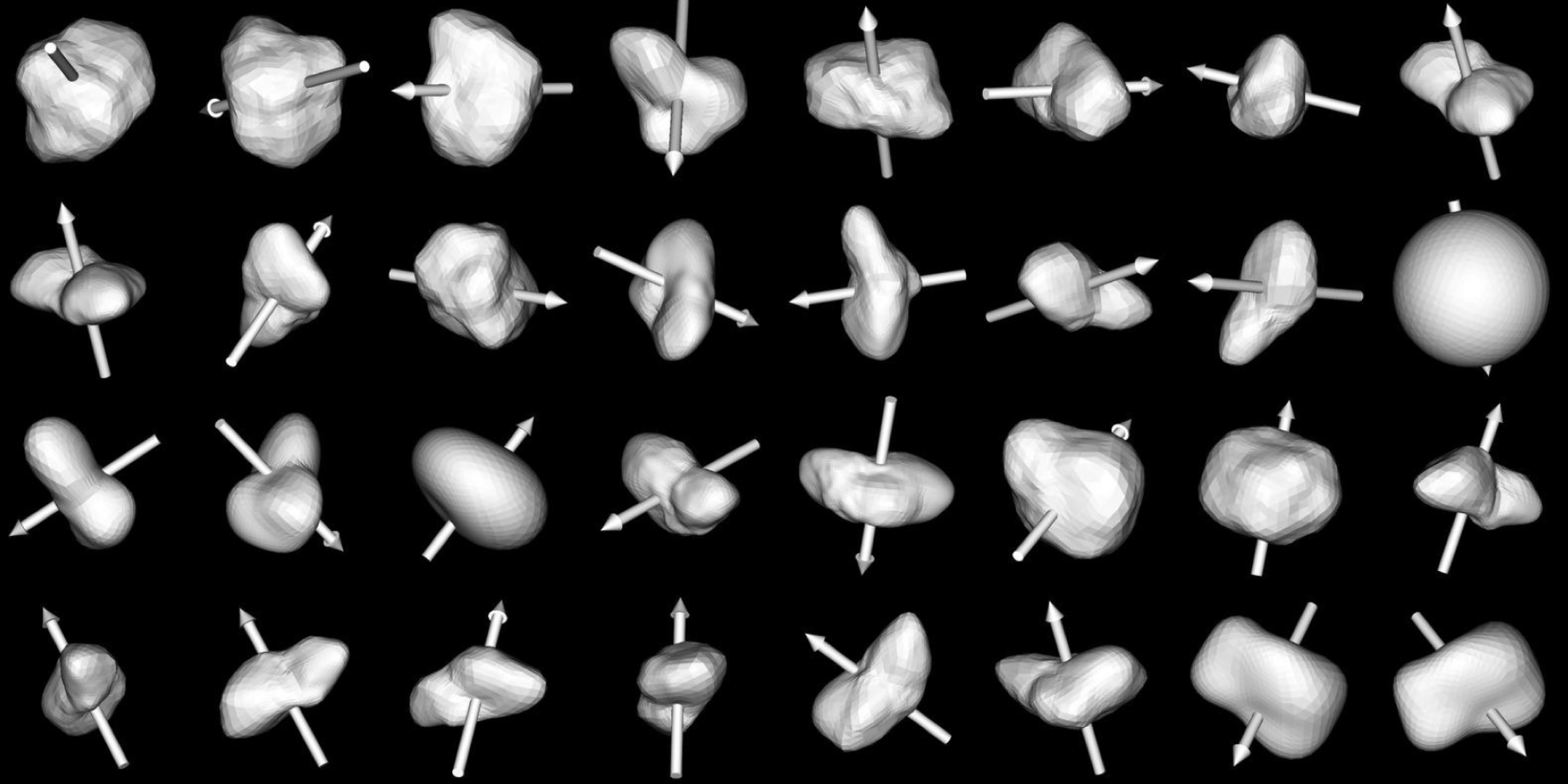
[그림 8] SHAPE로 생성한 소행성의 3차원 영상[2]
기존의 방법으로는 데이터 전처리 과정과 도플러 관측 데이터를 입력하여 소행성의 3차원 영상을 생성하기까지 약 4주가 소요되었다[7]. FDL 2017의 Sean Marshall 외 3명으로 구성된 팀은 소행성의 3차원 영상 생성 시간을 단축하기 위해, 데이터 전처리 및 영상 형성에 딥러닝을 적용하였고, 4~6시간 만에 레이더 도플러 영상을 입력하여 소행성의 3차원 레이더 영상을 형성하는 모델을 개발하였습니다. 해당 팀은 딥러닝 모델을 학습시킬만큼 충분한 레이더 도플러 이미지가 없었기 때문에 NASA에서 개발한 SHAPE 소프트웨어를 이용하여 동일한 소행성의 다양한 상태의 운동 자세를 모델링한 후에, 이 형상을 바탕으로 도플러 이미지를 생성했습니다. 그림 7과 그림 8은 SHAPE로 생성한 2차원 및 3차원 영상의 예시입니다. 소행성 형상을 생성하기 위해 사용한 딥러닝 구조는 심층 생성 모델 중 하나인 GAN(Generative Adversarial Network)이다[8]. GAN은 생성자(Generator)와 판별자(Discriminator)로 구성된 네트워크인데, 생성자와 판별자 간 적대적 학습 (adversarial training)을 통해 생성자에 임의의 입력이 있을 때, 원하는 이미지를 자연스럽게 생성하도록 유도됩니다. 학습을 통해 2차원 도플러 영상을 입력받아 3차원 소행성을 묘사할 수 있는 생성자가 학습되면, 2차원 도플러 이미지만 입력되더라도 자연스러운 3차원 소행성 형상을 생성할 수 있습니다. 그림 9에서 2차원 도플러 영상이 입력되어 3차원의 소행성 영상이 생성되는 전반적인 과정을 나타내었습니다.
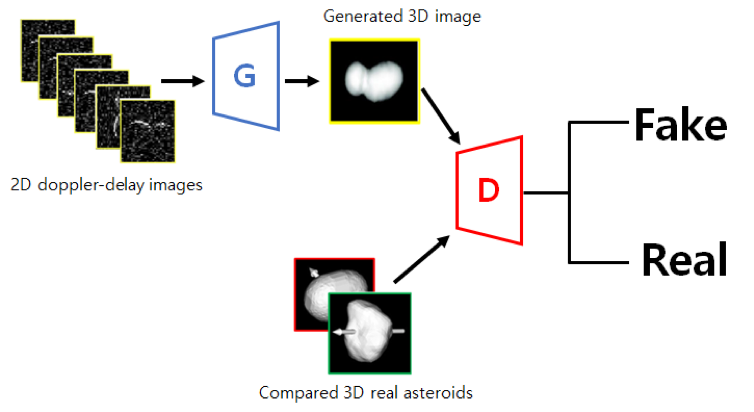
[그림 9] GAN을 이용하여 도플러 이미지를 입력으로 받아 3차원 소행성 영상을 생성하는 과정
LUNAR WATER & VOLATILES
우주 탐사에 있어서 연료생산에 필요한 물과 휘발성 물질은 중요한 자원입니다. 달 탐사와 행성 탐사 등의 우주 임무를 수행하기 위해서는 많은 연료, 생명 유지 등이 요구되는데 만약 우주에서 물을 획득할 수 있다면 우주 임무 비용을 줄일 수 있을 것입니다. 2008년의 Chandrayaan-1 임무와 2009년의 LCROSS 임무에서 달 극지역의 분화구 중심에서 물이 발견되었습니다. 달의 남극과 북극 분화구 바닥은 태양을 보지 못하는 영구음영지역입니다. 이곳의 온도는 약 40K(-233.15°C)이며 물 뿐 아니라 휘발성 물질도 동결됩니다. 따라서 미래의 우주 탐사를 위해서는 이러한 물과 휘발성 물질이 달에 얼마나 있는지, 분포가 어떠한지를 정확히 파악할 필요가 있으며, 이를 위해 로버를 이용하고 있습니다. 로버가 달 탐사 임무를 원활하게 수행하려면 달 표면의 분화구에 대한 정확한 정보가 필요합니다. 이를 위해 Lunar Reconnaissance Orbiter(LRO)는 달 표면 전체를 0.5m의 광학 해상도와 20m의 레이저 고도계를 사용하여 촬영하였습니다. 하지만 여러 번의 궤도 주행을 하며 얻은 이미지들을 결합할 때 합성 인공물(synthetic artefacts)이 나타났습니다. 이러한 합성 인공물은 사진으로는 긴 교차선으로 나타나며 로버에게 이것은 20ft의 벽이나 골자기로 여겨져 달 횡단에 큰 문제를 야기합니다. 이미지에서 이러한 합성 인공물을 제거하기 위해서는 다수의 이미지 소스를 함께 비교하여 공통된 이미지만 남기는 방식을 사용하지만 달에는 GPS가 없기 때문에 겹칠 이미지의 지리적 위치가 정확하지 않습니다. 따라서 달의 가장 보편적이고 많이 존재하고 있는 분화구를 기준으로 가장 적합한 이미지를 찾아 매칭하여 오버레이하는 방법을 사용합니다.
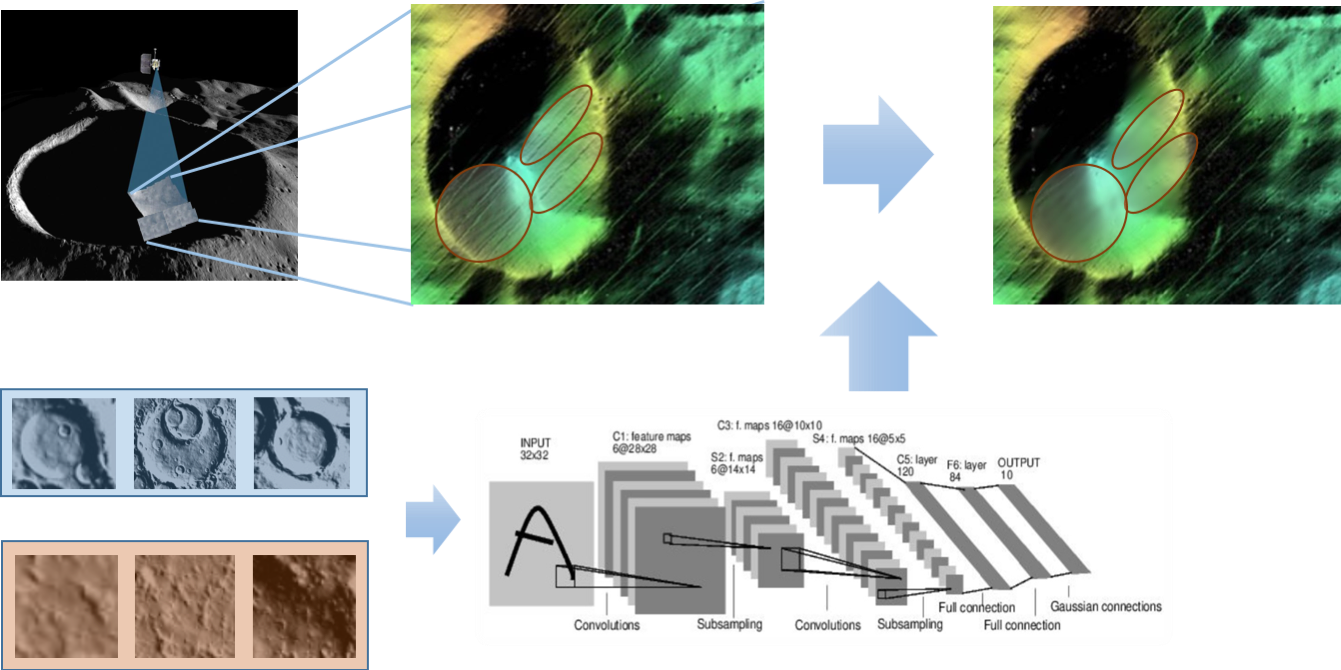
[그림 10] Deep Learning based Classifier
이러한 작업을 수행하기 위해서는 이미지에서 분화구를 추출할 필요가 있습니다. 이에 FDL 2017팀은 0.5m 광학 해상도 이미지와 20m해상도의 DEM(Digital Elevation Model)을 데이터 셋으로 하는 Deep Neural Network를 사용하였습니다. 32x32 픽셀 크기의 타일 40,000개를 모아 ‘분화구’와 ‘분화구가 아닌’ 이미지로 구분하여 데이터셋을 구축하였습니다.
| GROUP | Vijayan et al. | Di et al. | Emani et al. | FDL |
|---|---|---|---|---|
| YEAR | 2013 | 2014 | 2015 | 2017 |
| METHOD | PATTERN RECOGNITION | PATTERN RECOGNITION | CNN | CNN |
| PRECISION | 91% | 87% | 86% | 98% |
| ERROR RATE | 9% | 13% | 14% | 2% |
| GROUP | HUMAN | SINGLE-LAYER | CNN |
|---|---|---|---|
| ACCURACY | - | POOR | 98.4% |
| TIME (1k IMAGES) | 1-3 HOURS | 10 HOURS | 1 MINUTE |
[표 2] Mapping Poles Results
Classifier를 사용한 분화구 탐지의 결과는 표 2와 같습니다. 1,000개의 데이터 셋을 1-3분안에 처리했습니다. FDL 2017 기간 동안에 이미지를 오버레이하여 합성 인공물을 제거하는 단계까지는 도달하지 못했으나 이 연구는 우주 산업에 현대 시스템의 적용 가능성과 유용성을 증명하는 사례라는 데에 큰 의미가 있습니다.
SOLAR STORM PREDICTION
태양에서 발생하는 현상 중 가장 폭발적으로 일어나는 현상으로 태양 플레어(Flare)가 있습니다. 태양 표면에는 자기장이 존재하는데, 자기장이 불안정하여 자기 재결합(Magnetic Reconnection)이 일어날 때 플레어가 발생합니다. 이 때 발생한 플레어로 인하여 태양의 물질들의 가속이 일어나 고에너지 입자들이 방출되고, 다양한 파장대에서의 복사 방출, 특히 X-ray에서의 방사가 일어납니다. 방출된 입자와 X-ray는 지구에 직접적으로 영향을 줄 수 있습니다. 예를 들어, 우주 공간에서 활동하는 인공위성의 CCD, 태양광 패널, 반도체 등 주요 부품의 고장의 원인이 되기도 하고, 지구의 대기를 교란시켜 장거리 통신에 영향을 주기도 하며, 우주 비행사 혹은 극항로를 운항하는 비행 승무원 및 승객이 받는 방사능 피폭량에도 영향을 줍니다. 다시 말하자면, 태양 플레어는 이제는 전 세계적으로 보편화되어 있는 우주 산업과 항공 산업에 매우 큰 영향을 줄 수 있으므로 마치 비를 예보하거나 태풍 경보를 내리듯이 태양 플레어에 대한 예보 또는 경보가 필요하지만 그것이 쉽지는 않습니다. 태양 플레어를 통하여 방사되는 X-ray는 폭발이 일어나는 순간 지구까지 빛의 속도로 8분 30초만에 도달한다, 태양에서 발생하는 다른 폭발 현상인 Coronal Mass Ejection(CME, 코로나 질량 방출)이나 Solar Energetic Particle(SEP, 태양 고에너지입자)과 같은 현상들은 폭발 후 지구에 도달하기까지 적게는 수 시간에서, 많게는 수일이 걸리는 것과는 대조됩니다. 다시 말해, 태양 플레어는 지구에서 관측함과 동시에 지구에 영향을 주기 시작하는 것을 의미하며, 사실상의 경보는 불가능하다는 것을 말합니다. 이러한 이유로 다수의 태양 폭발 예보모델들이 개발되어 왔으며, 태양 폭발과 우주기상과의 상관관계에 대한 이해를 바탕으로한 수치 혹은 경험적 모델, 통계적 모델 또는 기계학습(Machine Learning)을 통한 모델 등이 있습니다. 가장 잘 알려진 통계 모델은 태양 흑점의 분류를 통한 통계적 모델입니다. Patrick McIntosh는 태양의 크기나 형태 등 3가지 기준을 통하여 분류하는 McIntosh Sunspot Class를 만들었으며, 많은 학자들이 이 McIntosh Sunspot Class의 각 흑점군별로 태양 플레어의 발생 확률을 통계적으로 정리하여 태양 플레어를 예보하는 모델을 개발하였습니다.
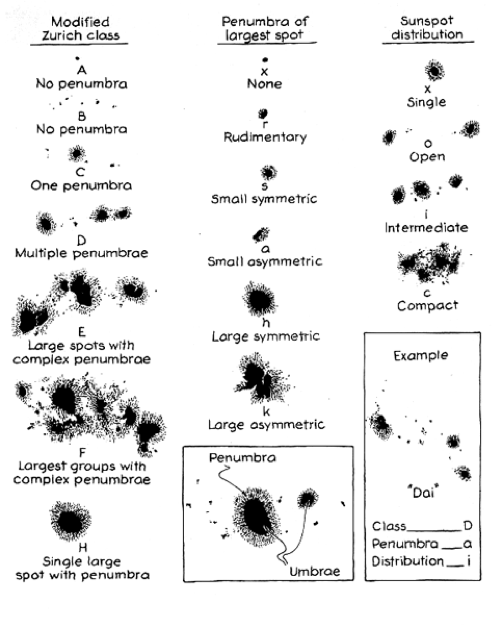
[그림 11] McIntosh Sunspot Class[9], McIntosh Sunspot Class는 크게 3가지 기준을 통하여 태양 흑점을 분류합니다.
2017년 FDL의 Solar Storm Prediction 팀은 태양 플레어 예보 모델 개발에 Solar Dynamics Observatory (SDO) 위성의 탑재체인 Atmospheric Imaging Assembly (AIA)를 이용하여 관측한 극자외선 (Extreme UltraViolet ,EUV) 영상 중 8개의 채널 이미지를 입력인자로, 미대기해양청의 지구관측 정지궤도위성인 Geostationary Operational Environment Satellite (GOES) 위성에서 관측한 X-ray 플럭스를 출력인자로 사용하였습니다. 또한 모델의 구조로는 합성곱 신경망(Convolutional Neural Network, CNN)을 사용하여 8채널 영상의 크기를 줄이고, 특징맵을 추출하여 최후에 11개의 출력 인자를 산출해내는 모델을 구성하였습니다.
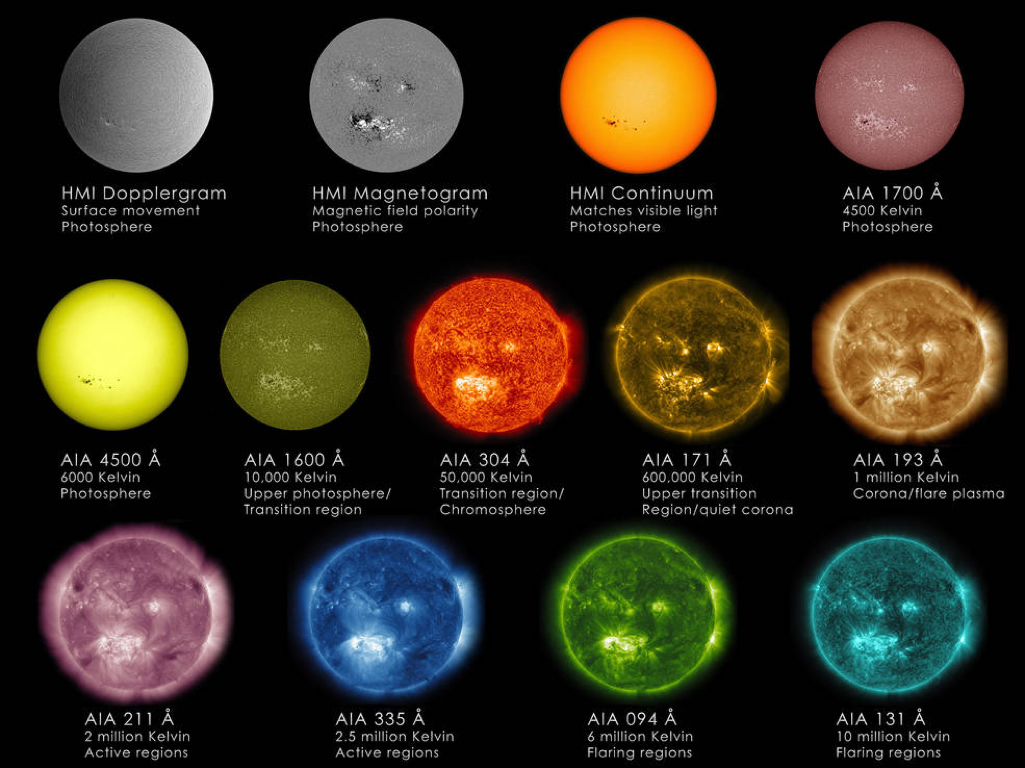
[그림 12] Solar Dynamics Observatory (SDO) Channel Images[10], SDO 위성에서 관측하고 있는 여러 파장대의 이미지
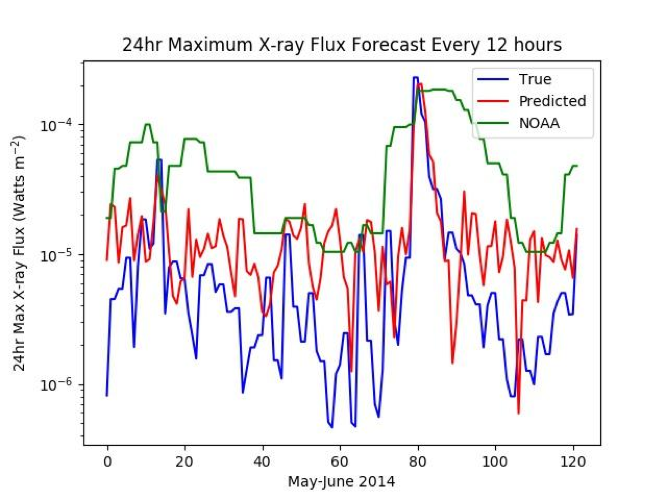
[그림 13] CNN을 이용한 X-ray 플럭스 예측 결과
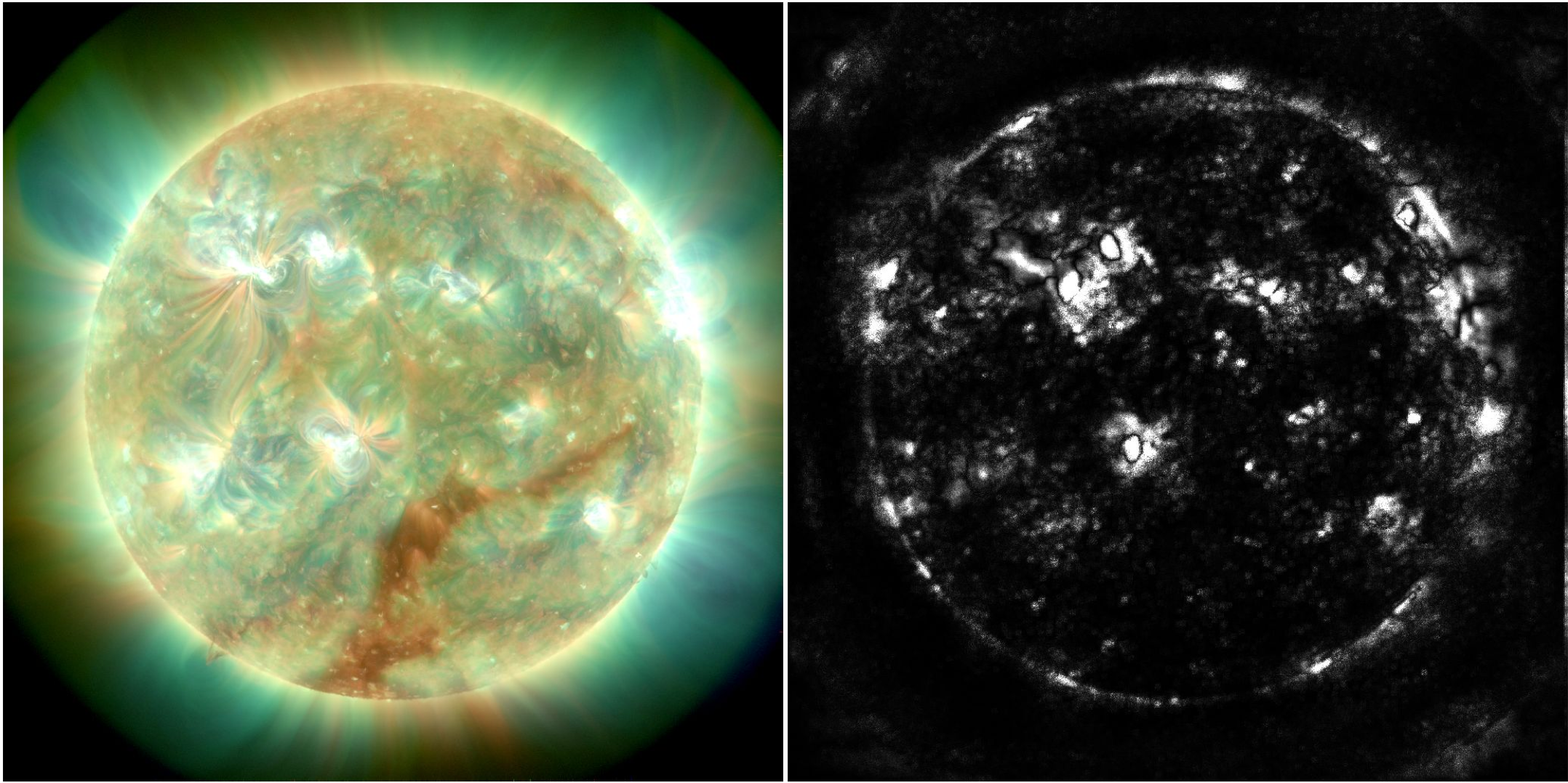
[그림 14] CNN모델에 입력한 영상과, 입력 영상에 컨볼루션을 적용한 영상
그 결과, 훈련된 모델은 2014년 6월에 발생한 X-class의 태양 플레어 폭발을 예측하는데 성공하였습니다. 그리고 훈련된 모델을 분석한 결과, CNN모델에 태양 채널 영상만을 입력해 주었음에도 불구하고, 태양의 활성 영역 (Active Region, AR)에 가중치를 두어 계산을 수행하도록 모델이 훈련되었음을 확인하였습니다. FDL의 연구팀은 인공지능을 활용한 태양 활동 분석 및 예측이 기존 모델들의 예측 신뢰성과 정확성을 향상시킬 수 있었다고 하였습니다.
SOLAR-TERRESTRIAL INTERACTIONS
태양활동으로 인해 태양 입자들이 분출되어 우주환경에 영향을 미치게 됩니다. 이러한 입자들은 빠르면 수 분에서 수 일에 이르기까지 지구에 영향을 미치게 됩니다. 극지방에 오로라가 발생하고 지자기 폭풍으로 인해 위성, 발전소 들은 무용지물이 될 수 있으며 항공기는 방사선에 노출되어 항로를 변경해야 하고, 통신 시스템에 장애를 발생시킵니다. 태양 활동에 대한 연구를 위하여 지자기 데이터 및 태양풍 데이터를 이용하여 모델링 하고 이를 예보에 활용하고 있습니다. 오픈 소스 기계학습 프레임워크 위에 STING(Solar Terrestrial Interactions Neural Network Generator) 이라는 지식 검색 모듈을 구축하여 연구자들로 하여금 복잡한 데이터에 대한 탐색을 수행할 수행할 수 있도록 하였습니다. Open Access Science Data 와 AI(Artificial Intelligence), ML(Machine Learning)을 통해 과학적 통찰과 더 나은 예측을 위한 발전을 추구하고 있습니다.
[그림 15] FDL 2017 SOLAR-TERRESTRIAL INTERACTIONS 프로젝트
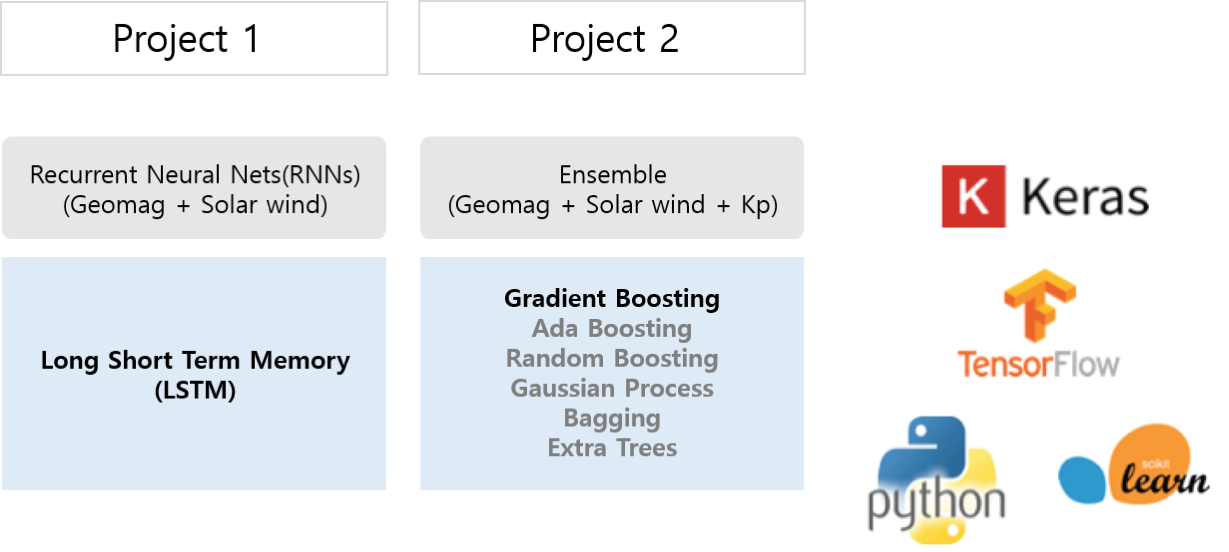
Kp 지수는 매일 3시간 간격으로 측정한 지자기의 범위를 말하며 는 지자기 데이터와 태양풍 데이터를 이용하여 예측을 수행하기 위해 2가지의 프로젝트를 진행하였습니다.
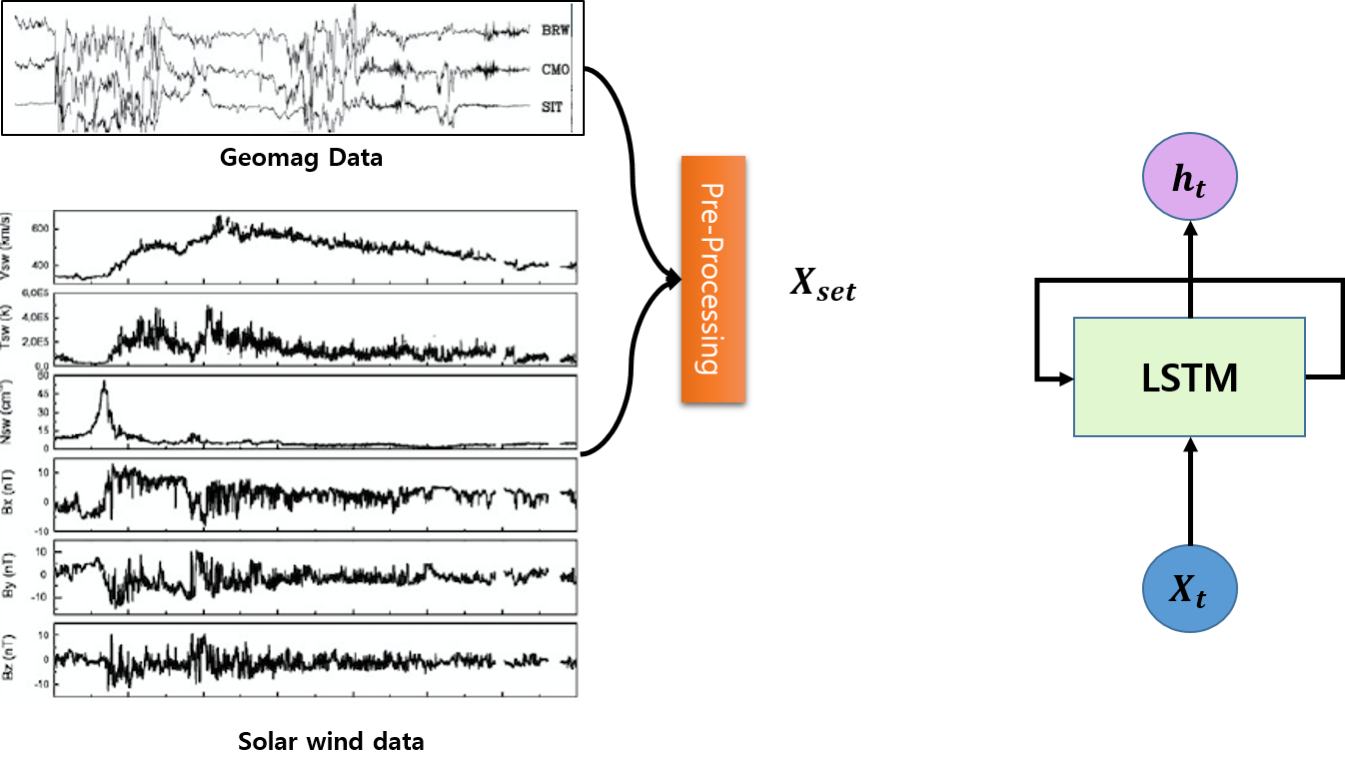
[그림 16] LSTM을 이용한 태양풍 예측 모델 구성 예시
첫번째 프로젝트는 LSTM 기법을 적용한 딥러닝 모델로 시계열 특성을 지닌 데이터에 대한 예측 시 많이 활용되고 있는 모델로써 Geomag 데이터와 태양풍 속도를 이용하여 지구의 남북방향의 지자기 강도를 예측 하기 위한 시도 및 남북방향의 지자기 강도를 이용하여 태양풍의 속도를 예측하도록 관리되었다
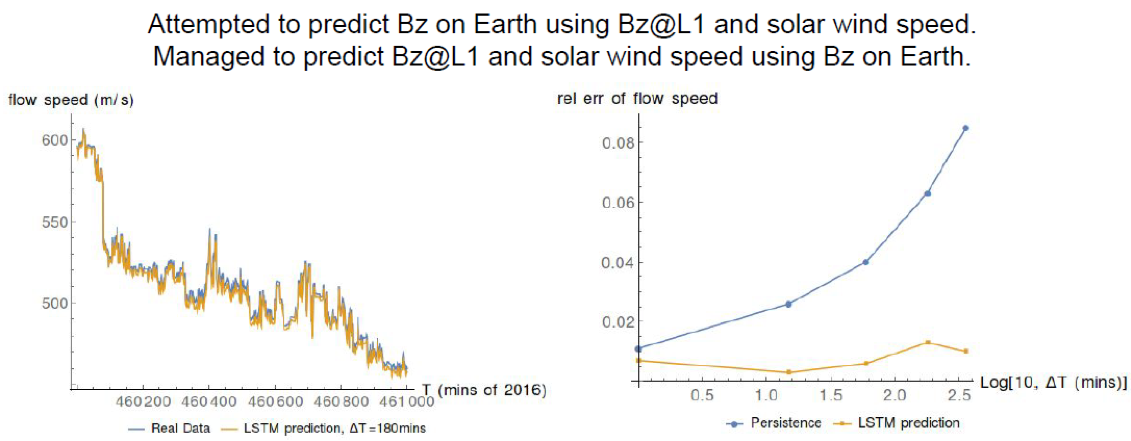
[그림 17] LSTM을 이용한 지자기 및 태양풍 속도 예측 결과
그림 17의 좌측은 태양풍의 속도 변화에 대한 예측결과이며 우측은 LSTM 예측 모델과 기존에 연구했던 수치 모델의 오차를 비교한 그래프입니다. 이를 통해 LSTM 모델이 패턴 및 경향성이 더 잘 맞는 것을 확인 할 수 있습니다. 두 번째 프로젝트로 Gradient Boosting 모델로써 각 트리는 문제에 대한 솔루션의 추정치이며 각 취약한 트리가 강력한 솔루션에 기여할 수 있습니다. 훈련이 반복 될때마다 가중치를 재 구성 하며 손실함수가 최소화되는 트리 앙상블을 찾는 것이 최종 목표입니다. 실험을 위해 10개월치의 데이터를 사용하였으며 실제 Kp 지수와 Gradient Boosting Regressor 모델을 이용하여 예측한 결과를 비교하였습니다. 그림 18에서 검정색 실선은 실제 Kp 지수를, 파란색 점은 Gradient Boosting Regressor 모델이 예측한 결과를 나타납니다.
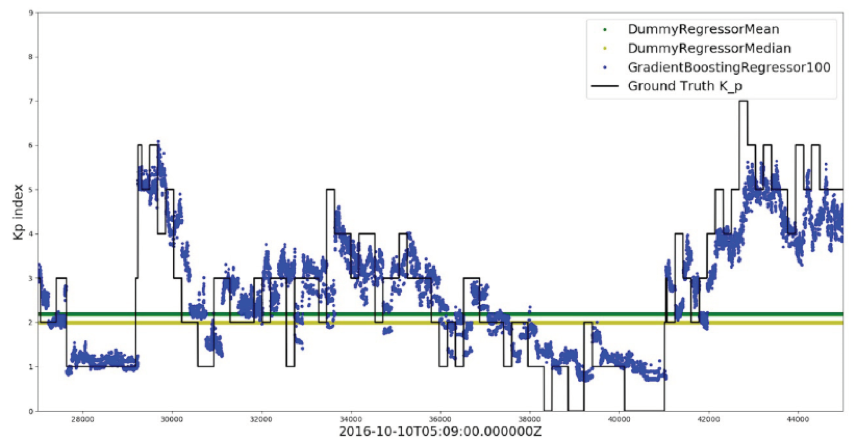
[그림 18] Kp 지수 예측 (3 Hour)
그림 19은 관찰 된 Kp 지수와 다양한 모델에서 예측 된 Kp 지수 사이의 평균 제곱 오차를 나타납니다. Gradient Boosting Regressor는 기존의 모델보다 뛰어난 성능을 보였습니다.
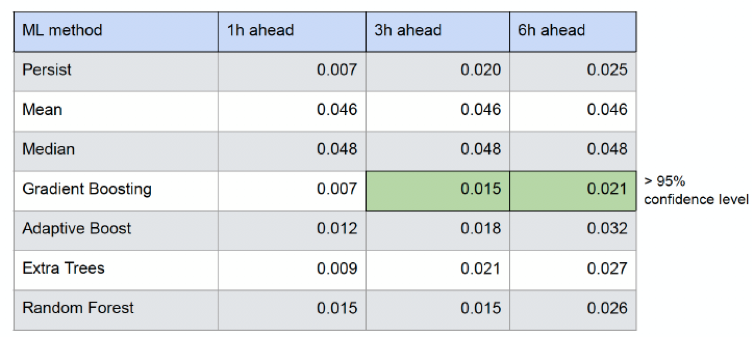
[그림 19] Kp 지수 예측 정확도 비교
FDL 2018 도전과제
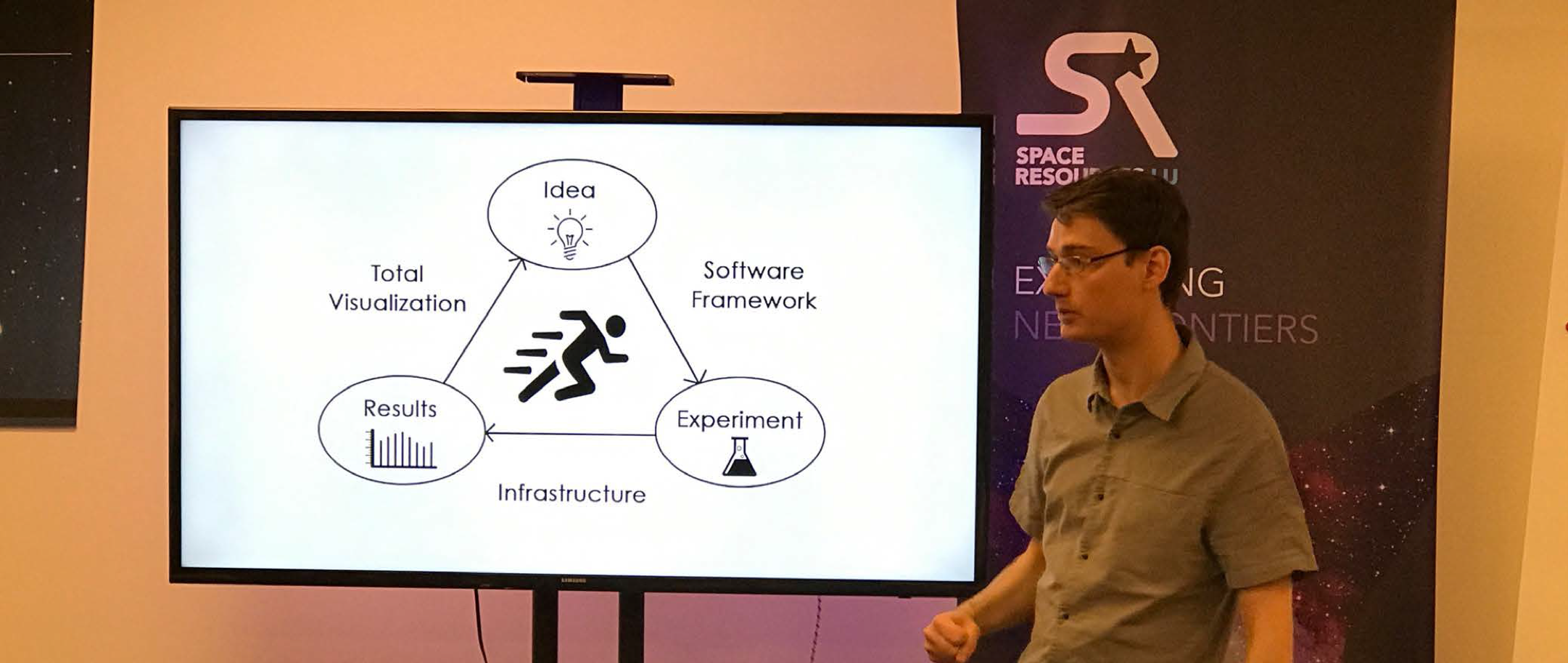
SPACE RESOURCES
FDL은 2018년 우주 자원 부문 인공지능 적용 도전 과제로 다개체 시스템을 적용한 자율 경로 계획 소프트웨어 플랫폼, 우주 자원 산업 생태계 초기 50년 모델링, 행성 표면 실시간 지도 작성을 위한 카메라 로컬라이제이션(localization) 3가지를 정했습니다.
자율 경로 계획 소프트웨어 플랫폼에 다개체 시스템 적용
FDL은 무인 탐사 임무에 다개체 시스템(multi-agent system, MAS)을 적용하면, 기존에 사용되던 하나의 매개체(agent)로 구성된 시스템으로 문제를 해결하는 방식보다 탐사선의 임무 수행 능력을 향상할 것으로 판단했습니다. 다개체 시스템이란, 주어진 목적을 이루기 위해 2대 이상의 매개체를 팀으로 운영하는 시스템을 의미한다[11]. Mevludin Glavic은 자신의 기술 보고서[12]에서 센서를 통해 주변 환경을 인지하는 것으로 간주 될 수 있는 모든 존재들을 매개체라고 정의합니다. 다개체 시스템은 이러한 매개체가 네트워크를 구성하여, 개체 간 단순 업무 분담뿐만 아니라 개체 간 정보교환을 통해 임무를 수행하기 위한 판단을 내릴 수 있습니다. 1980년 MIT에서 개최한 분산식 인공지능 워크숍을 시작으로 세계적인 연구분야가 되었고, NASA에서는 2002년 로봇 간 작업 보정을 위한 FIRE(Federation of Intelligent Robotic Explorers) 프로젝트를 수행하기도 했습니다. 그림 20은 FIRE 프로젝트의 화성 탐사 시뮬레이션 예시이다[13]. FDL은 이러한 다개체 시스템을 자율 경로 계획 소프트웨어 플랫폼에 적용하면 선행 정보가 없는 환경이나 예기치 못한 상황에 임무를 수행하는 무인 탐사선의 강인성 및 적응성을 높이고 단일 매개체의 제한된 기능을 다개체 시스템을 통해 보다 다양하게 향상할 것으로 기대하면서, 자율 경로 계획 소프트웨어 플랫폼에 인공지능 기술 접목하는 것을 우주 자원 부문 첫번째 과제로 선정했습니다.
[그림 20] FIRE 프로젝트 화성 탐사 시뮬레이션 예시 화면 [13]
초기 50년 간 우주 자원 산업 생태계 최적 모델링
인류를 우주라는 무대에서 영원한 존재로 유지하기 위해서는 자원이 한정된 지구를 벗어나 지속적인 우주 자원의 확보가 필수적입니다. 지난 10년 간 우주 자원을 확보하려는 목적으로, DSI(Deep Space Industries), Planetary Resources 등의 신생 기업이 설립되었습니다. 룩셈부르크에서는 2017년 7월에 민간 기업에 우주 자원을 채굴할 권리를 부여하는 법안이 의회에서 통과했고[14], 중국은 우주 자원 채굴을 위한 양해각서를 룩셈부르크와 체결하기도 했지만[15], 여전히 우주 자원 산업은 초기 단계에 있습니다. FDL은 이러한 우주 자원 산업 생태계를 향후 50년간 최적의 상태로 도출하려는 목적으로, 특정 사업에 투자할 것인지, 특정 기업을 인수할 것인지 등의 전략에 따른 위험을 사전에 예측하고 의사 결정하는 인공지능 모델 연구를 두 번째 과제로 선정했습니다.
행성 표면 실시간 지도 작성을 위한 카메라 로컬라이제이션
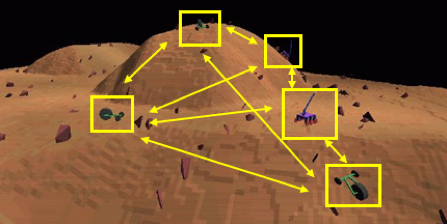
달이나 행성 표면을 탐사할 때 직면하는 어려움 중 하나는 탐사선으로부터 얻은 영상을 그림 21처럼 위성 영상의 시각으로 변환하는 것입니다. NASA는 달이나 행성 표면 탐사 임무에서 관찰 영상의 시각을 조정할 때, 과학자나 기술자의 전문지식에 의존하였다. 이러한 방식의 한계를 극복하기 위해서, FDL이 선정한 우주 자원 부문 2018년 세번째 도전 과제는 촬영 영상으로부터 탐사선이나 우주 비행사의 카메라 위치를 예측하고, 카메라 로컬라이제이션 하는 인공지능 모델을 개발하는 것입니다.
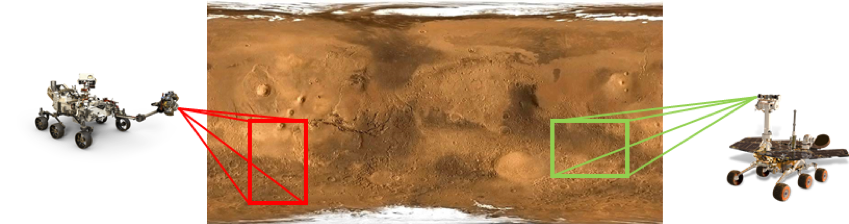
[그림 21] 화성 표면 지도[16]
EXOPLANETS
EXOPLANET은 외계행성으로 불리며, 태양계 밖의 행성으로, 태양이 아닌 항성 주위를 공전하는 행성이다[17]. 지금까지는 케플러우주망원경 사용하여 수천개의 외계행성을 찾았지만 임무 종료가 수개월 밖에 남지 않았습니다. NASA는 TESS(Transiting Exoplanet Survey Satellite)을 발사하여 태양계 외부의 항성계 시스템을 찾는 게 임무를 계속 수행하고자 합니다. 첫번째 도전과제는 2018년 4월 18일에 발사한 Transiting Exoplanet Survey Satellite(TESS)를 사용하여 외계행성 탐지 효율과 발견량을 증가시키는 것입니다. 케플러 우주 망원경으로 찾아낸 외계행성 후보는 5100개에 달하며 아직도 분석이 끝나지 않은 만큼 데이터 양이 매우 많습니다. 게다가 TESS는 우주 전체를 26개의 서로 다른 영역으로 나누어 24~96도의 범위로 2년간 탐색하는데 그 범위가 케플러의 400배에 달합니다. TESS를 통해 얻는 기존보다 더 많은 데이터는사람이 일일이 처리하기에는 너무 많은 양이기 때문에 AI를 적용하여 이러한 문제를 해결하고 더 많은 결과를 얻을 수 있을 것이라 기대합니다. 실제로 2017년 Google AI의 Chris Shallue는 신경망을 사용하여 케플러 우주망원경의 기록 테이터를 분석하여 2개의 알려지지 않은 외계행성을 발견하였다. 외계행성을 찾을 때 주로 횡단법(Transits)을 사용하는데, 이것은 외계행성이 관찰자와 항성 사이를 지나갈 경우 항성 표면에 검은 원반이 지나가는 것 처럼 보이는데 그때의 항성의 밝기가 어두워지는 정도를 통해 행성의 존재여부와 크기를 확인하는 방식입니다. 이러한 관측을 항성 전체에 대한 binary 이미지와 원반이 포함된 부분에 대한 이미지를 데이터셋으로하여 CNN을 사용하는 Classifier 모델을 학습하였고 이 모델을 사용하여 외계행성을 발견하였다.
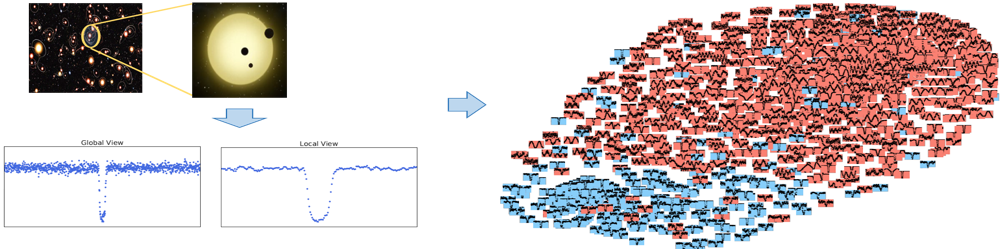
[그림 22] 횡단법을 사용하여 생성한 이진 이미지 데이터 생성
두번째 도전 과제는 TESS가 첫번째 과제에서 찾은 외계행성 중에서 암반행성을 더 잘 식별할 수 있도록 AI 기반의 외계행성 발견 및 분류 과정을 체계화하는 것입니다. 행성은 행성을 구성하는 물질에 따라 암반행성, 가스행성 그리고 얼음행성으로 구분되고 지구와 같은 행성이 암반행성에 속합니다. 이러한 암반행성의 발견은 외계 생명체의 존재 여부와 더 나아가 먼 미래에 인류가 거주할 제 2 지구의 가능성을 열어 줄 수 있을 것입니다.
SPACE WEATHER
우주환경 영역에서는 총 4개의 과제가 발표되었다. 첫번째 과제는 태양의 활동이 태양계에 미치는 새로운 영향을 찾는 것입니다. FDL 2017의 “Solar-Terrestrial Interactions” 팀은 태양풍 데이터를 활용하여 Kp 지수를 예보하도록 훈련된 모델을 발표하였다. 이번 과제에서는 이러한 단계에서 더 발전하여 SOHO와 같은 L1 포인트에 있는 위성 데이터를 활용한 태양과 전 세계의 기상 패턴, 번개, 지진 전조 현상과 같은 전 지구적 현상과의 관계를 찾는 것이 목표임을 제시하였다. 두번째 과제는 내일의 태양 영상 및 활동을 예측하는 것입니다. 이 과제의 목표는 축적되어 있는 수 테라바이트(TB)의 Solar Dynamics Observatory (SDO)/ Atmospheric Imaging Assembly (AIA) 영상 자료를 활용하여 향후 24시간의 태양 활동을 예측하는 모델을 훈련하는 것입니다. 개발될 모델은 시계열 형태의 과거의 AIA 영상들을 활용하여 향후 24시간 이내의 태양 이미지를 출력하는 것을 목표로 훈련될 것입니다. 세번 째 과제는 SDO/AIA 영상을 활용하여 태양에서 방출되는 에너지의 양을 파장대별로 예측하는 것입니다. 태양으로부터 방출되는 전자기파는 지구 상층 대기에 영향을 주는 중요한 요소입니다. 태양 플레어 폭발과 코로나 질량 방출(Coronal Mass Ejection, CME)와 같은 단기간에 발생하는 태양 폭발 현상은 지구 상층 대기에 큰 소란을 끼칠 수 있고, 대기를 가열시켜 인공위성이 대기와의 마찰로 인해 지구 방면으로 끌려오는 현상의 원인이 될 수 있다. 이 과제의 목표는 SDO/AIA 영상을 활용하여 태양으로부터 방출되는 극자외선(Extreme Ultraviolet, EUV)과 soft X-ray의 방사량을 예측하는 모델을 훈련시키는 것입니다. 극자외선과 soft X-ray의 지구 입사량은 위성 궤도에서 위성 끌림 현상과 지구 대기의 장기적 진화 등을 예측하는 지구 대기 모델의 중요한 입력 인자이기 때문에 훈련된 모델의 결과가 활용될 수 있을 것으로 예측됩니다. 마지막 네번째 과제는 Global Positioning System (GPS) 및 Global Navigation Satellite System (GNSS) 관측 자료를 이용한 전리권 모델의 개선입니다. 이 과제는 과거에 수집되었던 방대한 양의 Global Positioning System (GPS) 및 Global Navigation Satellite System (GNSS) 관측 자료와 그 신호들이 지구 대기를 통과하는 과정에서 발생한 산란에 대한 관측을 토대로 전리층의 상태를 분석하고 전리층과 우주기상 간의 상관관계를 분석할 수 있는 모델을 개발하는 것입니다.
SPACE TRAFFIC MANAGEMENT / ORBITAL DEBRIS
2018년도에 새롭게 준비된 파트로 두 가지 과제를 담고 있습니다. 첫번째 과제로는 우주 대기모델을 예측하는 것으로 광범위한 우주환경, Resident Space Objects(RSOs) 추적데이터, 궤도 예측 모델의 Resource Description Framework(RDF) 등에 적용하여 우주비행체의 위험에 대한 조기 경보 등 정보제공에 정확도 등의 성능을 높이고자 합니다. 인공지능 기술은 RDF와 같은 정보에서 우주비행체의 동적 패턴을 학습하고 추출하는 방식으로 RSO와 관계된 우주환경과 전반적인 저궤도 RSO분포에 대한 궤도 운동의 예측 정확도를 향상시킬 것으로 기대됩니다. 두번째 과제로는 양자기술을 이용한 효과적인 우주 교통관리(Space traffic management)와 장기적 궤도 안정성을 위한 충돌 불확실성을 줄이는 것입니다. 다양한 우주임무를 수행하기 위해 많은 인공물체들이 근지구궤도에 올라가게 되며 이로인한 우주환경은 계속적으로 악화될 것이며, 우주 규제당국의 장기 궤도 안정성 확보는 점점 더 어려워지는 상황입니다. 이에 본 과제에서는 충돌상황에서의 불확실한 모델을 양자컴퓨팅알고리즘(quantum computing algorithm)을 적용하고자 합니다. 충돌상황 계산은 방대한 계산이 요구되며, 우주공간 특성상 오차발생이 큰데, 고전적인 시뮬레이션에서는 궤도공간의 곡선 오류 볼륨(curvilinear error volume)으로 인해 계산 정확도가 낮습니다. 양자기반 컴퓨팅 기술은 이를 극복하고 장기 임무에 보증을 위한 중요한 최적화 추정을 위한 툴이 될 것으로 기대됩니다. 그림 23은 우주물체의 충돌상황을 나타낸 것이며, 타원체는 위치공분산으로 각 우주물체의 위치불확실성을 표시한 것입니다. Primary의 경우, 궤도정보를 많이 갖고 있기 때문에 위치불확실성이 낮으나 다른나라 소유이거나 우주쓰레기인 Secondary는 궤도정보의 정확도가 다소 떨어집니다. 본 과제에서는 인공지능과 양자컴퓨팅 알고리즘을 통해 보다 정확한 우주 대기 모델을 생성하여, 장기적 궤도 안정성을 높이고자 합니다.
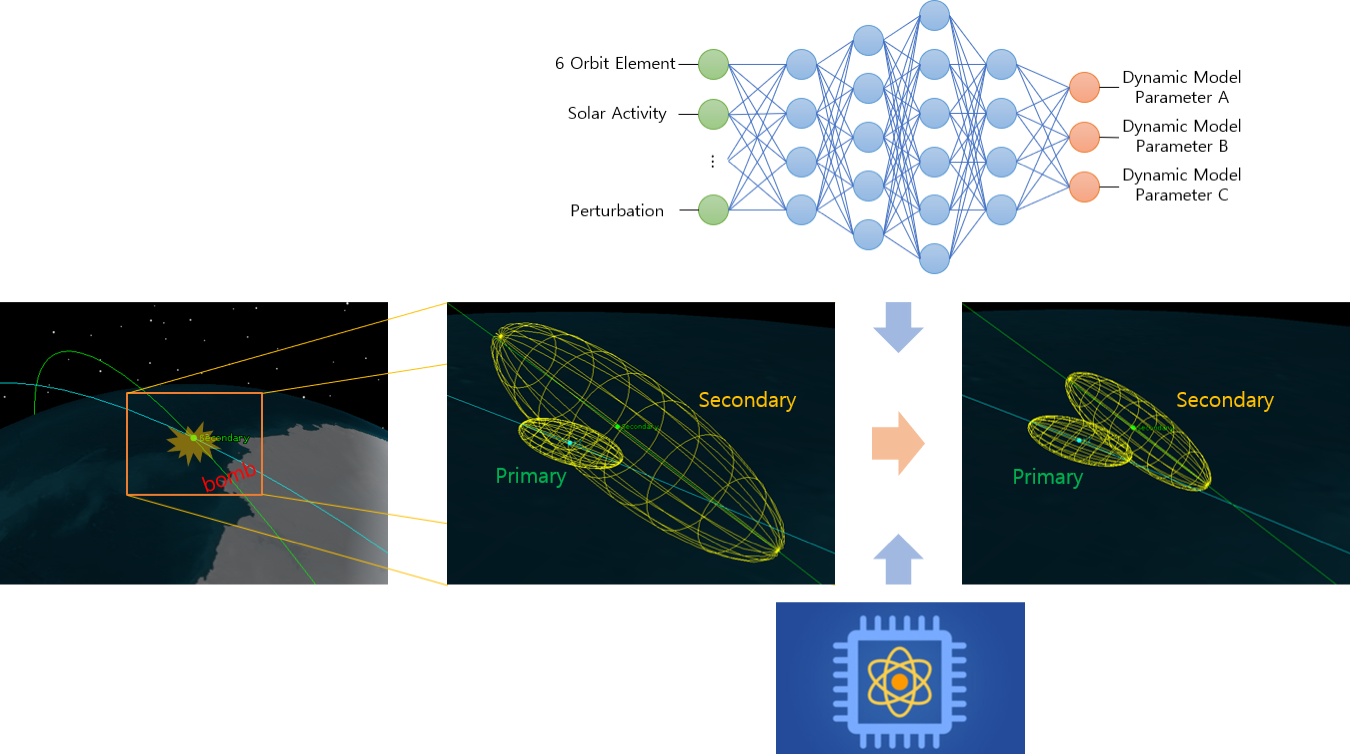
[그림 23] 우주물체 충돌상황
EARTH OBSERVATION
센티넬(Sentinel) 2호와 같은 원격탐사 위성이 발사한 이래, 자연 현상을 보다 높은 수준으로 이해할 수 있게 되었습니다. 하지만 아직 새로운 위성 데이터 처리나, 데이터 처리 시간의 지연, 그리고 지상의 데이터와 위성 관측 데이터와의 결합의 문제 등은 위성 데이터 활용 극대화에 걸림돌이 되고 있습니다. 따라서 이러한 문제를 해결하기 위해 인공지능 기술 기반의 대용량 데이터 처리나, 자연현상 감지 등의 작업을 자동화하는 연구를 기획하였고, 최종적으로 지구 환경 모니터링 및 시간적인 지구 변화 감지, 다양한 타입의 데이터 관측 및 검증, 실시간 데이터 품질 관리 등에서 효율성 향상을 도모하고자 합니다. 또한 향상된 위성 데이터 처리 기법을 통하여 최종적으로 지구 환경 변화나 지진 등의 재난을 예측하여 피해예상지역에 대한 경고나 대피 인력 배치 등과 같은 재난 대응에 활용할 예정입니다.
FDL 지원방법
FDL은 NASA FDL 홈페이지(http://www.frontierdevelopmentlab.org) 지원 가능합니다. 지원 시에는 소속, 학위 내용 등의 간단한 인적사항 기재와 지원 동기 및 목표, 그리고 이력서 또는 지원서 업로드를 요구합니다. 지원 분야는 크게 두 가지로, 첫 번째는 우주 탐사(Space Exploration), 그리고 인공 지능(Artificial Intelligence) 입니다. 두 분야에 종사하는 박사과정 또는 박사후과정을 밝고 있는 연구원들이 지원 가능합니다. 인공 지능 분야의 지원자의 경우, 기계학습(Machine Learning) 또는 딥러닝(Deep Learning)의 경험이 필요하고, TensorFlow, Keras, Torch 등의 딥러닝 프레임워크(Framework) 프로그래밍 경험을 요구하며, 있는 경우 GitHub 프로필을 기재해야 합니다. 박사후과정 지원자의 경우, J-1 비자를 발급받아야 하기 때문에 이를 위한 준비 과정도 필수입니다.
결론
국가기관과 학계 그리고 민간 기업에서 서로 협력하여 우주분야에 인공지능 기술은 연구하는 프로그램인 FDL에 대해서 알아보았습니다. FDL는 효율적이고 혁신적인 연구를 위해 여섯 가지 방법론에 기초하여 연구 문화를 형성하였고, 공공 분야와 민간 분야의 파트너쉽을 통해 연구 수행을 위해 많은 자원과 혜택을 얻었습니다. NASA에서는 FDL의 도전 과제별로 보유하고 있는 방대한 자료를 제공합니다. 2017년도에 이뤄졌던 연구의 문제 정의, 데이터셋, 적용 모델, 결과를 살펴보고 2018년에는 분야별로 어떤 도전 과제가 있는 지 알아보았다. 2018년 FDL은 올해 여름에 진행될 예정이니 어떠한 연구 성과가 나올 지 기대됩니다. 항공우주분야의 인공지능 기술 접목을 위해서는 연구주제와 데이터셋을 산학연이 공유하여 공동 연구하는 것이 중요하다는 것을 다시 한번 알게되는 계기가 되었으며, 우리나라에서도 FDL과 같이 여러 전문기관이 모여 항공우주분야의 문제들을 함께 고민하고 연구하는 프로그램이 생겼으면 하는 바램입니다.
결론
- (1) http://keras.io
- (2) http://www.frontierdevelopmentlab.org/images/proceedings_brochure.pdf
- (3) Susana Zoghbi et al., “Searching for Long-Period Comets with Deep Learning Tools”, Deep Learning for Physical Science, Neural Information Processing Systems, 2017
- (4) https://www.nasa.gov/planetarydefense
- (5) https://adamcobb.github.io/journal/3D-Shape-Modelling-of-Asteroids.html
- (6) https://www.jpl.nasa.gov/spaceimages/details.php?id=PIA20043
- (7) https://www.slideshare.net/LeonardSilverberg/fdl-2017-3d-shape-modeling?qid=67980c69-fbc1-4a2b-9551-777f3b612b2f&v=&b=&from_search=1
- (8) Goodfellow, Ian, et al. “Generative adversarial nets.” Advances in neural information processing systems.
- (9) http://www.pozorovanislunce.eu/vykladovy-slovnicek/mcintoshova-klasifikace-slunecnich-skvrn.html
- (10) https://www.nasa.gov/content/goddard/how-sdo-sees-the-sun
- (11) 최정식, 이범희, 이제훈, 윤영환. (2010). 다개체 로봇의 협업기술과 응용. 전기의세계, 59(11), 16-26.
- (12) Mevludin Glavic,2006, Agents and Mutli-Agent Systems: A short Introduction for Power Engineers, Belgium University
- (13) http://www.cs.cmu.edu/~./FIRE/index.html
- (14) http://spacenews.com/luxembourg-adopts-space-resources-law/
- (15) http://www.spaceresources.public.lu/en/actualites/2018/Luxembourg-cooperates-with-China-in-the-exploration-and-use-of-outer-space-for-peaceful-purpose.hml
- (16) http://planetary-science.org/mars-research/mars-cartography/
- (17) https://en.wikipedia.org/wiki/Exoplanet
같이 보기
케라스 코리아 커뮤니티
캐글 코리아 커뮤니티
책 소개
[추천사]
- 하용호님, 카카오 데이터사이언티스트 - 뜬구름같은 딥러닝 이론을 블록이라는 손에 잡히는 실체로 만져가며 알 수 있게 하고, 구현의 어려움은 케라스라는 시를 읽듯이 읽어내려 갈 수 있는 라이브러리로 풀어준다.
- 이부일님, (주)인사아트마이닝 대표 - 여행에서도 좋은 가이드가 있으면 여행지에 대한 깊은 이해로 여행이 풍성해지듯이 이 책은 딥러닝이라는 분야를 여행할 사람들에 가장 훌륭한 가이드가 되리라고 자부할 수 있다. 이 책을 통하여 딥러닝에 대해 보지 못했던 것들이 보이고, 듣지 못했던 것들이 들리고, 말하지 못했던 것들이 말해지는 경험을 하게 될 것이다.
- 이활석님, 네이버 클로바팀 - 레고 블럭에 비유하여 누구나 이해할 수 있게 쉽게 설명해 놓은 이 책은 딥러닝의 입문 도서로서 제 역할을 다 하리라 믿습니다.
- 김진중님, 야놀자 Head of STL - 복잡했던 머릿속이 맑고 깨끗해지는 효과가 있습니다.
- 이태영님, 신한은행 디지털 전략부 AI LAB - 기존의 텐서플로우를 활용했던 분들에게 바라볼 수 있는 관점의 전환점을 줄 수 있는 Mild Stone과 같은 책이다.
- 전태균님, 쎄트렉아이 - 케라스의 특징인 단순함, 확장성, 재사용성을 눈으로 쉽게 보여주기 위해 친절하게 정리된 내용이라 생각합니다.
- 유재준님, 카이스트 - 바로 적용해보고 싶지만 어디부터 시작할지 모를 때 최선의 선택입니다.